The Kilobot is designed to make tests of collective algorithms on hundreds or thousands of robots accessible to robotics researchers.
 Additionally they are designed to operate such that no robot requires any individual attention by a human operator. This makes controlling a group of Kilobots easy, whether there are 10 or 1000 in the group.
Additionally they are designed to operate such that no robot requires any individual attention by a human operator. This makes controlling a group of Kilobots easy, whether there are 10 or 1000 in the group.Introduction to Kilobot
Kilobot is a low-cost, easy-to-use robotic system for advancing development of “swarms” of robots that can be programmed to perform useful functions by coordinating interactions among many individuals. These swarms are inspired by social insects, such as ant colonies, that can efficiently search for and find food sources in large complex environments, collectively transport large objects, and coordinate the building of nests and bridges in such environments.
Following this inspiration from nature, robot swarms might one day tunnel through rubble to find survivors, monitor the environment and remove contaminants, assist dwindling bee populations in pollinating crops, and self-assemble to form support structures in collapsed buildings. The Kilobot is designed to provide scientists with a physical testbed for advancing the understanding of collective behavior and realizing its potential to deliver solutions for a wide range of challenges.
- Low cost
- Small, only 33mm of diameter
- Fine motor controlling (255 differents power levels)
- The Kilobot can communicate with neighbors up to 7 cm.
- Neighbor-to-neighbor distance sensing
- Ambient light sensing
- RGB led
- Rechargable and amovible battery
- Easy to manipulate, with the Kilobot controller you can program and
control hundreds of Kilobot at one time.

Courtesy of Antti Halme at ICS department, Aalto University, Finland
SPECIFICATIONS
The pack includes
- Ten Kilobots including one battery per robot
Price:
- Recommended price (a pack of ten robots) : 1100 CHF (excluding local taxes and shipping costs)
| ELEMENTS | TECHNICAL INFORMATIONS |
|---|---|
| Processor | ATmega 328P (8bit @ 8MHz) |
| Memory | 32 KB Flash used for both user program and bootloader, 1KB EEPROM for storing calibration values and other non-volatile data and 2KB SRAM |
| Battery | Rechargeable Li-Ion 3.7V, for a 3 months autonomy in sleep mode. About 2.5 hours in standard use with motors. Each Kilobot has a built-in charger, which charges the onboard battery when +6 volts is applied to any of the legs, and GND is applied to the charging tab. |
| Charging | Kilobot charger (optional). Time for charge is about 3 hours |
| Communication | Kilobots can communicate with neighbors up to 7 cm away by reflecting infrared (IR) light off the ground surface. |
| Sensing | When receiving a message, distance to the transmitting Kilobot can be determined using received signal strength. The brightness of the ambient light shining on a Kilobot can be detected. |
| Movement | Each Kilobot has 2 vibration motors, which are independently controllable, allowing for differential drive of the robot. Each motor can be set to 255 different power levels. |
| Light | Each Kilobot has a red/green/blue (RGB) LED pointed upward, and each color has 3 levels of brightness control. |
| Dimensions | The diameter is 33 mm and the height is 34mm (including the legs) |
| Software | The KiloGUI interface is available for controlling the controller board, sending program files to the robots and controlling them. |
| Programming | For programming, the open source development software WinAVR combinated with Eclipse gives a C programming enviromnent. An API with basic functions such as motor speed, led control, distance measurement,… is available and some examples are provided. An online compiler is also available directly on the Kilobotics website |
| Debug | A serial output header is available on each robot for debugging via computer terminal. |
| Simulator | V-REP, realistic 3D Simulator and robot programming (included for education), with Kilobot model. |
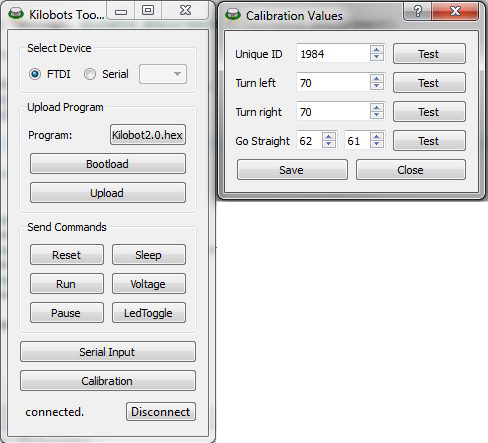
SOFTWARE
The Kilobot GUI interface (picture on the right) is available for
controlling the controller board, sending program files to the
robots and controlling them.
Programming
The open source development software WinAVR combinated with Eclipse gives a C programming enviromnent. An API with basic functions such as motor speed, led control, distance measurement,… is available and some examples are provided.
An online compiler is also available directly on the Kilobotics website
MANUAL / DOWNLOADS
Kilobot Manuals & Downloads
This section is dedicated to the new Kilobot firwmare based on the Kilobotics version.
All the Kilobot delivered after February 2016 with a serial number above 3000, will be already programmed with this version.
For previous version, the manual and files can be found under the Old Manual / Download section below.
If you want to update your old Kilobot system to the new one, please follow the procedure available here
Manuals
Software
OLDER MANUAL / DOWNLOADS
If you want to update your old Kilobot system to the new one, please follow the procedure available above
Manuals
Software