Focus on the ARK system: increment in Kilobot robots abilities
 At the beginning of this year, we would like to present you with the Augmented Reality for Kilobots (ARK) system. This system, published in IEEE Robotics and Automation Letters in July 2017 (https://doi.org/10.1109/LRA.2017.2700059), was first developed at the University of Sheffield and later replicated in several laboratories across Europe. ARK enhances the capabilities of Kilobot robots as they are able to sense and modify a virtual environment in real-time based on their state and location. Hence, the ARK system allows running experiments with Kilobots equipped with virtual sensors and actuators. Furthermore, ARK simplifies operating large Kilobot swarms as it offers automation tools for house-keeping operations, such as automatic motor calibration, unique ID assignment, and positioning. The ARK system is composed of an overhead camera tracking system that follows the Kilobots’ state and location, an overhead emitter that communicates with the Kilobots via infrared signals, and a base control station that orchestrates the system and runs the simulation of the virtual environment. The great advantages of this system are that it is open-source, similarly to Kilobot robots it is inexpensive, it expands Kilobots’ functionalities and simplifies operating the robots. The ARK system has been successfully tested in large-scale experiments with up to 200 Kilobots collectively foraging in an augmented real environment (see Talamali et al., 2020; https://doi.org/10.1007/s11721-019-00176-9). We consider the ARK system as a low-cost solution to increase the basic sensors and actuators of the Kilobot robots, and to enable even more sophisticated research in swarm robotics.
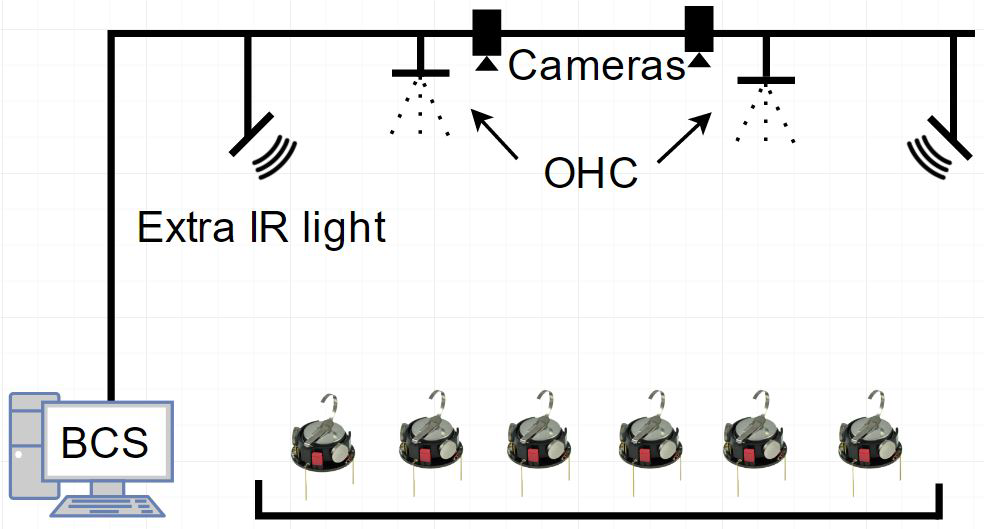
At the beginning of this year, we would like to present you with the Augmented Reality for Kilobots (ARK) system. This system, published in IEEE Robotics and Automation Letters in July 2017 (https://doi.org/10.1109/LRA.2017.2700059), was first developed at the University of Sheffield and later replicated in several laboratories across Europe. ARK enhances the capabilities of Kilobot robots as they are able to sense and modify a virtual environment in real-time based on their state and location. Hence, the ARK system allows running experiments with Kilobots equipped with virtual sensors and actuators. Furthermore, ARK simplifies operating large Kilobot swarms as it offers automation tools for house-keeping operations, such as automatic motor calibration, unique ID assignment, and positioning. The ARK system is composed of an overhead camera tracking system that follows the Kilobots’ state and location, an overhead emitter that communicates with the Kilobots via infrared signals, and a base control station that orchestrates the system and runs the simulation of the virtual environment. The great advantages of this system are that it is open-source, similarly to Kilobot robots it is inexpensive, it expands Kilobots’ functionalities and simplifies operating the robots. The ARK system has been successfully tested in large-scale experiments with up to 200 Kilobots collectively foraging in an augmented real environment (see Talamali et al., 2020; https://doi.org/10.1007/s11721-019-00176-9). We consider the ARK system as a low-cost solution to increase the basic sensors and actuators of the Kilobot robots, and to enable even more sophisticated research in swarm robotics.
Full motion video ARK system: https://www.youtube.com/watch?v=K0KvPzhOSDo
Full motion video Swarm intelligence: https://www.youtube.com/watch?v=0wqN9T6Y4VA